PIC Microcontroller Features, Types, and Applications
2026-02-18
3542
Catalog

PIC Microcontroller Basics?
A PIC microcontroller is a compact programmable integrated circuit used to control electronic devices and embedded systems. It is designed to automatically perform specific tasks by reading input signals, processing information, and controlling output devices. PIC stands for Peripheral Interface Controller. It is designed to interact with external hardware such as sensors, motors, displays, and communication devices, making it suitable for automation and control applications.
PIC microcontrollers are developed and supported by Microchip Technology, which provides software, development tools, and programming hardware for system design and implementation. PIC microcontrollers serve as the main controller in embedded systems. They provide efficient, reliable, and cost-effective control for a wide range of electronic and automation applications.
PIC Structure and Architecture

Figure 2. Basic Computer Achitecture with Control Unit, ALU, Memory, and I/O
|
Component |
Description |
Functions |
|
Central Processing Unit (CPU) |
The CPU is the main processing
unit responsible for executing instructions and controlling all
microcontroller operations. It processes data and coordinates internal
components. |
Executes program instructions,
controls system operations, and manages data processing |
|
Arithmetic Logic Unit (ALU) |
Part of the CPU that performs
arithmetic and logical operations. |
Performs addition, subtraction,
AND, OR, and other logical operations |
|
Control Unit |
Directs and manages the execution
of instructions inside the microcontroller. |
Controls instruction flow and
coordinates internal operations |
|
Registers |
High-speed internal storage
locations used during instruction execution. |
Stores temporary data for fast
processing |
|
Accumulator |
Special register used to store
intermediate results during processing. |
Holds temporary calculation
results |
|
Memory System (Harvard
Architecture) |
Uses separate memory for program
instructions and data, allowing faster operation. |
Enables simultaneous access to
instructions and data |
|
Flash Memory |
Non-volatile memory used to store
the program permanently. |
Stores firmware and allows
reprogramming |
|
RAM (Random Access Memory) |
Temporary memory used during
program execution. |
Stores variables and temporary
data; cleared when power is off |
|
EEPROM |
Non-volatile memory used for
permanent data storage. |
Stores configuration settings and
calibration data |
|
Special Function Registers (SFR) |
Control registers used to
configure and manage hardware modules. |
Controls timers, ADC,
communication modules, and I/O ports |
|
Stack Memory |
Memory used to store return
addresses during function calls and interrupts. |
Ensures correct program execution
flow |
|
Input and Output Ports (GPIO) |
Interface used to communicate
with external devices. |
Input: Receives signals from
sensors and switches Output: Sends signals to LEDs, motors, and displays |
|
Bus System |
Communication system connecting
internal components. |
Data Bus: Transfers data Address Bus: Identifies memory locations |
|
Analog-to-Digital Converter (ADC) |
Converts analog signals into
digital form. |
Allows reading of sensor data
such as voltage, temperature, and light |
|
Timers and Counters |
Provide timing and event counting
functions. |
Creates delays, measures
frequency, generates signals, supports PWM |
|
Interrupt System |
Allows immediate response to
important events. |
Pauses current task and executes
interrupt routines |
|
Serial Communication Modules |
Enables communication with
external devices using standard protocols. |
USART: Serial communication SPI: High-speed communication I2C: Multi-device communication |
|
Oscillator and Clock System |
Generates the clock signal that
controls processing speed. |
Supports internal and external
clock sources and controls execution speed |
|
CCP Module (Capture, Compare,
PWM) |
Provides advanced timing and
signal control functions. |
Capture: Records signal timing Compare: Generates timed output PWM: Controls motors and LED brightness |
Working Principle of PIC Microcontrollers
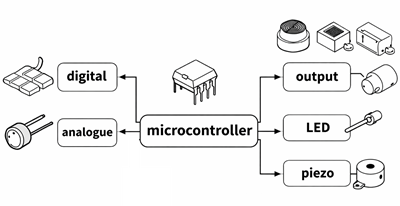
Figure 3. Microcontroller Processing Digital and Analog Inputs to Control Outputs
PIC microcontrollers operate using an input–process–output cycle:
Input: The microcontroller reads signals from sensors or switches.
Process: The CPU executes programmed instructions stored in memory.
Output: The microcontroller sends control signals to devices such as LEDs, motors, or displays.
For example, a PIC microcontroller can read temperature data from a sensor and activate a cooling fan when the temperature exceeds a preset value. This automatic response makes PIC microcontrollers suitable for control and automation systems.
Features of PIC Microcontrollers
• Integrated memory system for program storage and data handling
• Built-in communication interfaces (UART, SPI, I2C)
• Timing and signal control modules
• Interrupt support for fast event response
• Flexible clock system with internal and external oscillators
• Integrated ADC for analog signal processing
• Low power operation
• Wide range of models for different applications
Different Types of PIC Microcontrollers

Figure 4. DIP Package for 8-Bit PIC Microcontrollers
8-bit PIC Microcontrollers
8-bit PIC microcontrollers are best suited for simple and low-power applications. They are commonly used in basic control systems, household electronics, and sensor-based projects. These microcontrollers are cost-effective, easy to program, and widely used in beginner and intermediate embedded systems.

Figure 5. 16-Bit PIC Microcontroller from Microchip
16-bit PIC Microcontrollers
16-bit PIC microcontrollers provide higher performance, faster processing speed, and improved memory capacity compared to 8-bit models. They are suitable for more complex applications such as industrial automation, motor control, and power management systems. These microcontrollers offer better precision and efficiency.

Figure 6. 32-Bit PIC Microcontroller Designed for High-Speed Processing and Control
32-bit PIC Microcontrollers
32-bit PIC microcontrollers offer the highest performance, advanced processing capability, and larger memory capacity. They are designed for complex and high-speed applications such as IoT systems, automotive electronics, and advanced embedded systems. These microcontrollers support more sophisticated features and faster data processing.
PIC Microcontroller Programming Guide
Programming a PIC microcontroller involves writing code that allows the chip to control hardware such as LEDs, motors, sensors, and communication modules. The process starts by selecting a suitable PIC device based on memory size, I/O pins, and required peripherals like ADC, timers, or communication interfaces.
Next, you set up the development environment using tools such as MPLAB X IDE and the appropriate XC compiler. After creating a project, you write the program—usually in C—by configuring registers to control ports, timers, and other internal modules.
Once the code is complete, it is compiled into a HEX file and uploaded to the microcontroller using a programmer like PICkit. After programming, the device executes the instructions stored in its memory. Testing and debugging ensure the system works correctly and reliably in real hardware applications.
Applications of PIC Microcontrollers
Industrial Automation – PIC microcontrollers are widely used in motor control, robotics, manufacturing systems, and traffic light control to manage automation, timing, and real-time process control in industrial environments.
Household Electronics – In home appliances, remote controls, and smart devices, PIC microcontrollers handle user inputs, timing functions, signal transmission, and intelligent control features.
Automotive Systems – PIC devices support engine control, lighting systems, and safety electronics by monitoring sensors and ensuring reliable vehicle operation.
Medical Devices – PIC microcontrollers are used in monitoring equipment and portable diagnostic devices to process sensor data and ensure accurate, stable performance.
IoT Systems – In smart home devices, wireless sensors, and automation systems, PIC microcontrollers enable connectivity, data processing, and remote control capabilities.
Comparison of Popular Microcontrollers

Figure 7. Arduino, PIC, AVR, and ARM Families
|
Feature |
PIC |
Arduino
(Platform) |
AVR |
ARM |
|
Architecture |
RISC |
Platform-based |
8-bit RISC |
32-bit RISC |
|
Ease of Use |
Moderate |
Very easy |
Moderate |
Complex |
|
Performance |
Low to mid-level |
Moderate |
Low to mid-level |
High |
|
Power Consumption |
Low |
Moderate |
Low |
Moderate |
|
Cost |
Low |
Higher board cost |
Low |
Higher |
|
Development Tools |
MPLAB X IDE |
Arduino IDE |
Microchip Studio |
Multiple IDEs |
|
Best Use |
Industrial systems |
Learning and prototyping |
Simple control |
Advanced systems |
Pros and Cons of PIC Microcontrollers
Pros
• Easy to program and debug
• Low power consumption
• Integrated peripherals
• Cost-effective
• Reliable performance
• Strong Microchip support
• Wide range of models for different applications
Cons
• Lower performance than ARM microcontrollers
• Limited memory in entry-level models
• Less suitable for complex operating systems
Conclusion
PIC microcontrollers are reliable, affordable, and easy to use in many electronic systems. They help automate devices and simplify system design. Understanding PIC microcontrollers is important for learning embedded systems.
function test. The highest cost-effective products and the best service is our eternal commitment.
Hot Article
- LM358 Dual Operational Amplifier Comprehensive Guide: Pinouts, Circuit Diagrams, Equivalents, Useful Examples
- Are CR2032 and CR2016 Interchangeable?
- Understanding the Differences ESP32 and ESP32-S3 Technical and Performance Analysis
- BC547 Transistor Basics: Pinout, Application Circuits, Alternative/Complementary Models
- Choosing the Right Battery: A Guide to AG4, LR626, LR66, 177/376/377, SR626, and SR626SW Equivalents
- NPN vs. PNP: What's the Difference?
- esp32 vs stm32: which microcontroller is better for you?
- What Is a MOSFET and How It Works?
- Electrical Relay Basic: Working Operation, Types and Uses
- PNP Transistors: Structure, Working Principle and Application
 High-Electron-Mobility Transistors What It Is and Why It Is Important
High-Electron-Mobility Transistors What It Is and Why It Is Important
2026-02-18
 Monopole vs Dipole Antennas What’s the Difference?
Monopole vs Dipole Antennas What’s the Difference?
2026-02-17
Frequently Asked Questions [FAQ]
1. What programming languages are used for PIC microcontrollers?
PIC microcontrollers are mainly programmed using C and Assembly language. C is the most popular because it is easier to write, understand, and maintain. Assembly is used when precise control and maximum performance are required.
2. How do you choose the right PIC microcontroller for a project?
Choose based on memory size, number of I/O pins, speed, power consumption, and required peripherals. Simple projects use 8-bit PICs, while complex applications may need 16-bit or 32-bit PIC microcontrollers.
3. Do PIC microcontrollers need an external clock?
Not always. Many PIC microcontrollers have built-in internal oscillators. However, external crystals are used when higher timing accuracy is required.
4. What is firmware in PIC microcontrollers?
Firmware is the program code stored in the microcontroller’s Flash memory. It controls how the microcontroller reads inputs, processes data, and controls outputs.
5. What is the lifespan of a PIC microcontroller?
PIC microcontrollers can last many years, often over 10–20 years, depending on operating conditions. They are designed for long-term use in industrial and embedded applications.
6. Can PIC microcontrollers be reprogrammed?
Yes, PIC microcontrollers with Flash memory can be reprogrammed many times. This allows developers to update firmware and fix errors without replacing the chip.
7. What voltage do PIC microcontrollers operate on?
Most PIC microcontrollers operate between 2.0V and 5.5V, depending on the model. Low-power versions can operate at lower voltages for battery-powered devices.
8. Why are PIC microcontrollers widely used in industry?
PIC microcontrollers are reliable, cost-effective, and easy to integrate into embedded systems. Their stability and long-term support make them ideal for industrial and commercial products.
Hot Part Number
 CGA5L3X7S2A155M160AB
CGA5L3X7S2A155M160AB C3225JB2A155K200AB
C3225JB2A155K200AB CGA8P1C0G3F331K250KA
CGA8P1C0G3F331K250KA 12065A332KAT2A
12065A332KAT2A 06035A130CAT2A
06035A130CAT2A SMAJ7.0A
SMAJ7.0A MAX14983EETJ+
MAX14983EETJ+ V110B24T150BG
V110B24T150BG- V300B48H250BN
 BSC050N03LSGATMA1
BSC050N03LSGATMA1
- RT0805BRD073K6L
- KD224503
- RS1D
- LT323AT#PBF
- ADG438FBRZ
- OPA548FKTWT
- AD817AR-REEL
- MM74C912N
- MC1489ADR2
- STA8090FG
- AD5410AREZ
- NC7SZ157P6X
- TLC27L4CN
- ST62T25CB6
- ADG5208FBRUZ
- XA2C256-8VQG100Q
- AD558-6482
- AD7240JP
- BD82C602SLJKG
- CAT5221JI-10
- IDT7014S12JG8
- KFM1216Q2B-VEB8
- LC87F7932BVU-SQFP-H
- LM2711MTADJX/NOPB
- MC100EL57D
- ML6652EH
- PW106-10
- SCC2692AC1A44G
- STC12C5406AD-35I-SOP20
- THGBM4G6D2HBAIR
- UPD70F3015BGC-8EU-A
- ES8680CSC
- RCAMP0514M.TBT
- S1L1491X01-T0
- LCU032420
- LM2575GR-ADJ
- 6ES7516-3FN02-0AB0
- TEN30-4813WI
- MT42L128M64D2LL-25